PyTorch DistributedDataParallel Training
In this blog post, we will explore the concept of distributed training and delve into the details of PyTorch’s DistributedDataParallel training approach.
Some Prerequisite Definitions
Process: A process is the basic unit of work in an operating system. In the usual context of DDP, you can put that one process control one GPU.
Node: A node is a computational entity, you can think of that a node is a physical machine with several GPUs installed.
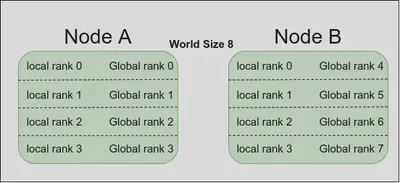
WORLD_SIZE: The number of total available GPUs. It is the product of number of nodes and number of GPUs per node, it is a constant in a fixed configuration. For example, if there are two nodes and four GPUs per node, then the WORLD_SIZE is 8.
RANK: It is an global id to identify a GPU among all the GPUs. For example, if we have two nodes with four GPUs each, the RANK will vary from 0−7.
LOCAL_RANK: LOCAL_RANK is used to identify the local GPU in a specific node. For example, if we have two nodes with four GPUs each, LOCAL_RANK will vary from 0−3 for each node.
How to configure DDP
To use DDP, you only need to configure your PyTorch training script in the following 3 steps:
- Initialize: You need to initialize the distributed backend using
torch.distributed.init_process_group(). This step ensures that all the devices can communicate with each other during the training process.
rank = int(os.environ["RANK"])
world_size = int(os.environ['WORLD_SIZE'])
local_rank = int(os.environ['LOCAL_RANK'])
dist.init_process_group(backend="nccl", init_method="env://", world_size=world_size, rank=rank)
Explanation: Use torchrun --nproc_per_node=4 ddp_train.py to launch script, torchrun will configure the info into os.environ as environment variables, world_size and rank are also taken to initialize the backend. GPU training currently only achieves the best performance using the nccl distributed backend, thus nccl backend is the recommended backend to use for GPU training. The init_method='env://' is recommended since it simplifies the initialization of the process group by automatically detecting and utilizing the appropriate communication backend based on environment variables.
- Wrap Model: Wrap your model with
torch.nn.parallel.DistributedDataParallel()to enable parallel training, this is designed for distributed training and should be used when working with DDP.
model = model.cuda(local_rank)
model = nn.SyncBatchNorm.convert_sync_batchnorm(model)
model = nn.parallel.DistributedDataParallel(model, device_ids=[local_rank])
Explanation: Regular batch normalization can introduce inconsistencies due to the differences in the statistics (mean and variance) calculated on each device. This can hinder the convergence of the model. By converting regular batch normalization layers to synchronized batch normalization layers using nn.SyncBatchNorm.convert_sync_batchnorm(), you can ensure consistent statistics calculation and improve the performance and convergence of your model.
- Data Parallelism: Use
torch.utils.data.DistributedSampler()to split the dataset across multiple devices.
trainset = torchvision.datasets.CIFAR10(root='./data/cifar10', train=True, download=True, transform=train_transform)
train_sampler = torch.utils.data.distributed.DistributedSampler(dataset=trainset)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=128, sampler=train_sampler, pin_memory=True)
And use set_epoch(epoch) in each epoch
trainloader.sampler.set_epoch(epoch)
Explanation: torch.utils.data.distributed.DistributedSampler() provides distributed sampling of data across multiple devices, it shuffles the indices of the dataset before partitioning, thus do not specify shuffle=True in dataloader.
- Note: Do logging things on main worker, i.e.,
local_rank==0, otherwise the output will be a mess.
The complete codes are available at github.
If you are running on Slurm based server, the example script to submit your job
#!/bin/bash
#SBATCH --job-name=ddp
#SBATCH --partition=gpu
#SBATCH --nodes=2
#SBATCH --ntasks-per-node=2
#SBATCH --ntasks=4
#SBATCH --gres=gpu:2
#SBATCH --cpus-per-task=4
#SBATCH --mem-per-cpu=2G
#SBATCH --export=all
#SBATCH --output=%x.out
#SBATCH --time=48:00:00
srun --kill-on-bad-exit=1 python ddp.py